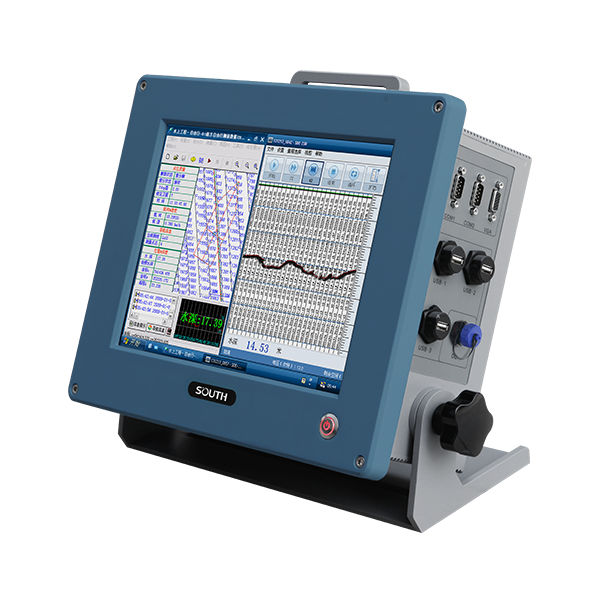
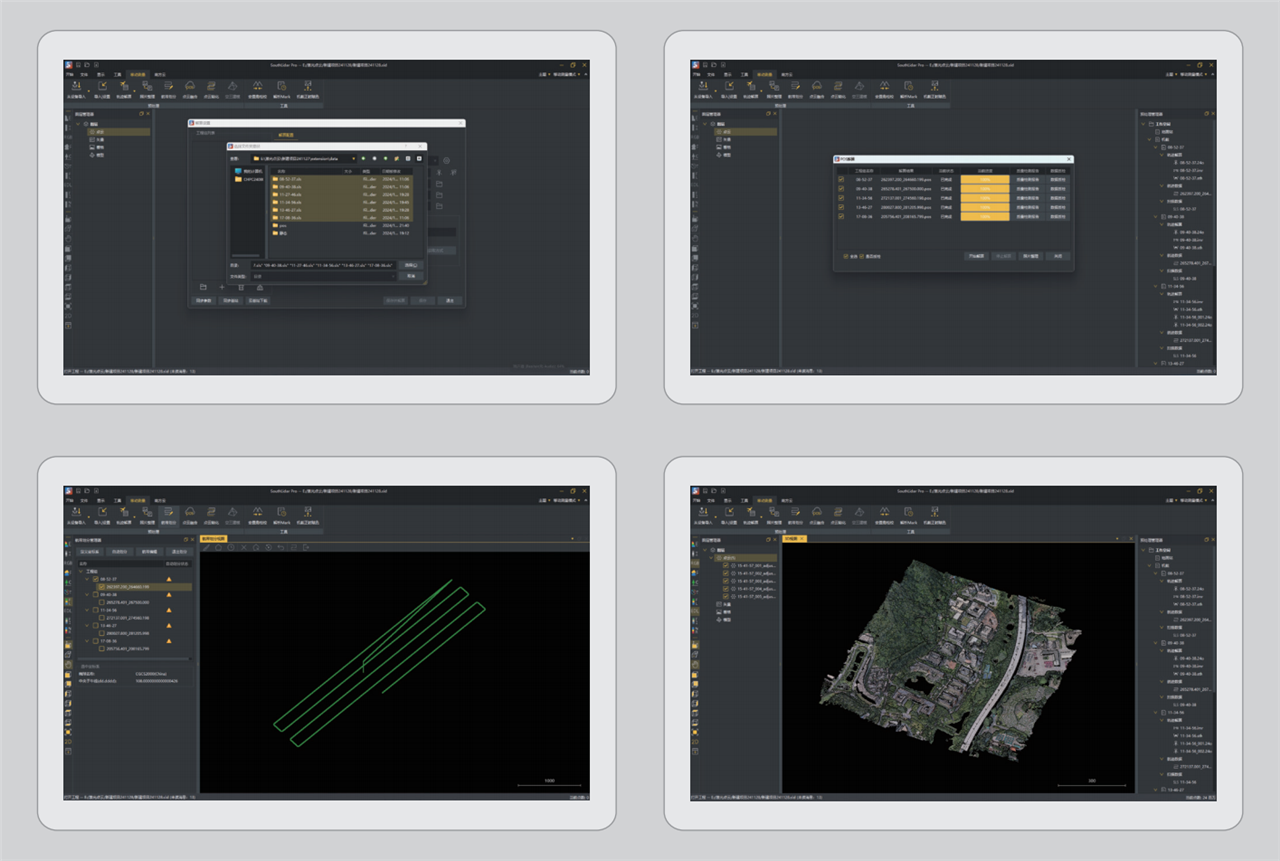
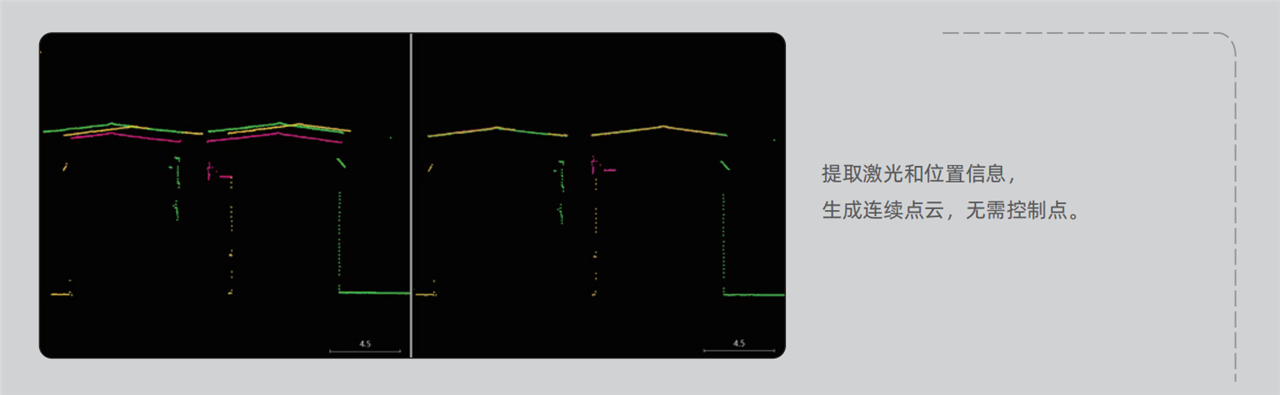
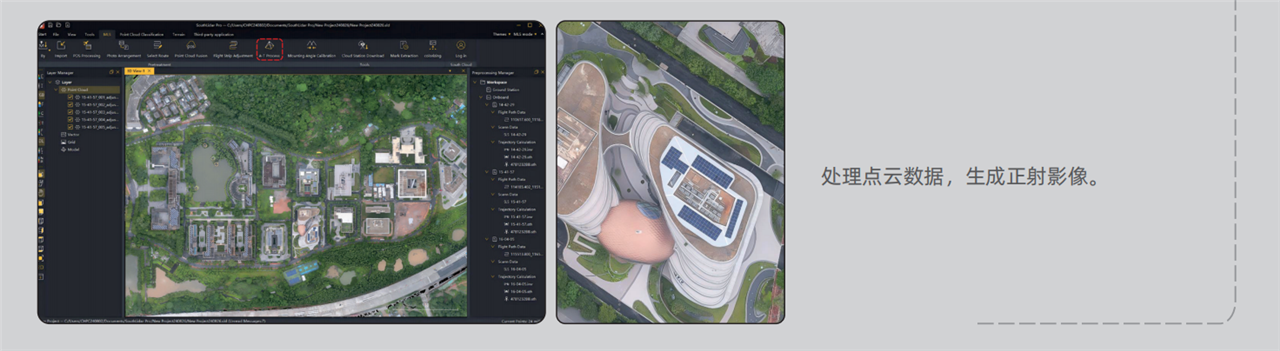
自主研发的三维激光一体化处理软件,能够处理架站式激光数据、机载激光雷达数据,并且可以导入多组数据,进行批量处理。

| 项目 | 数据 | |||||
激光脉冲重复频率PRR | 800kHz | 600kHz | 400kHz | 300kHz | 100kHz | |
飞行最大高度 | 80m | 100m | 200m | 250m | 300m | |
最大测量速率 | 800,000点/秒 | |||||
线扫速度 | 100线 | |||||
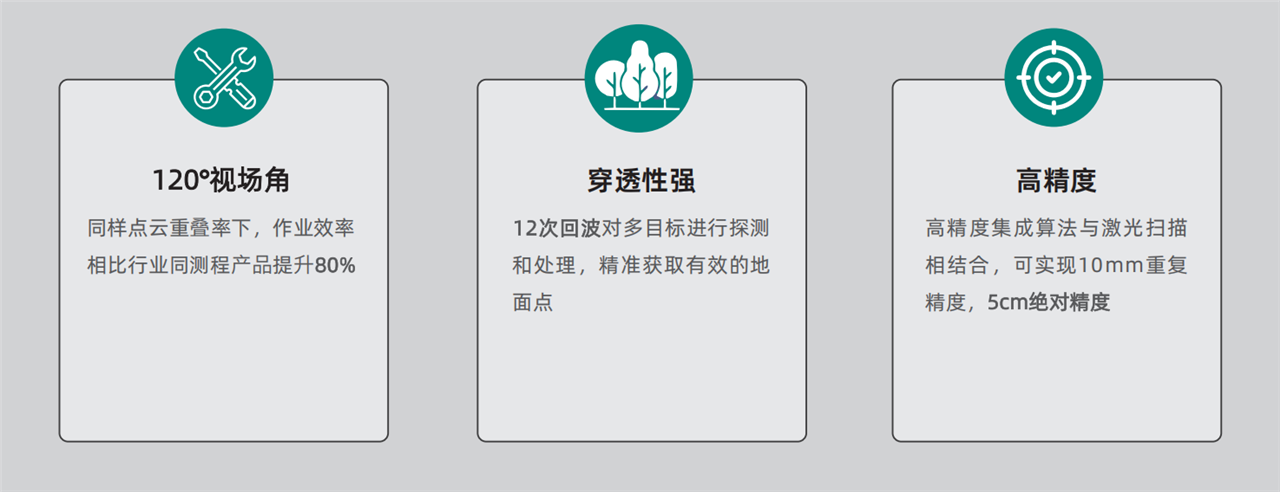
激光视场角 | 120° | |||||
回波次数 | 12 | |||||
最大测程 | 1000m@p>80% | |||||
精度/重复精度 | 15mm/10mm | |||||
激光等级 | ClassⅠ(依照IEC 60825-1:2014) | |||||
激光波长 | 1550nm | |||||
IMU & GNSS | ||||||
IMU精度 | 0.006°横滚,俯仰;0.019°航向 | |||||
IMU更新频率 | 500HZ | |||||
定位精度 | 0.01m水平;0.02m垂直(支持五星系统) | |||||
常规参数 | ||||||
系统精度 | ±5cm(H/V) | |||||
数据存储 | 256G | |||||
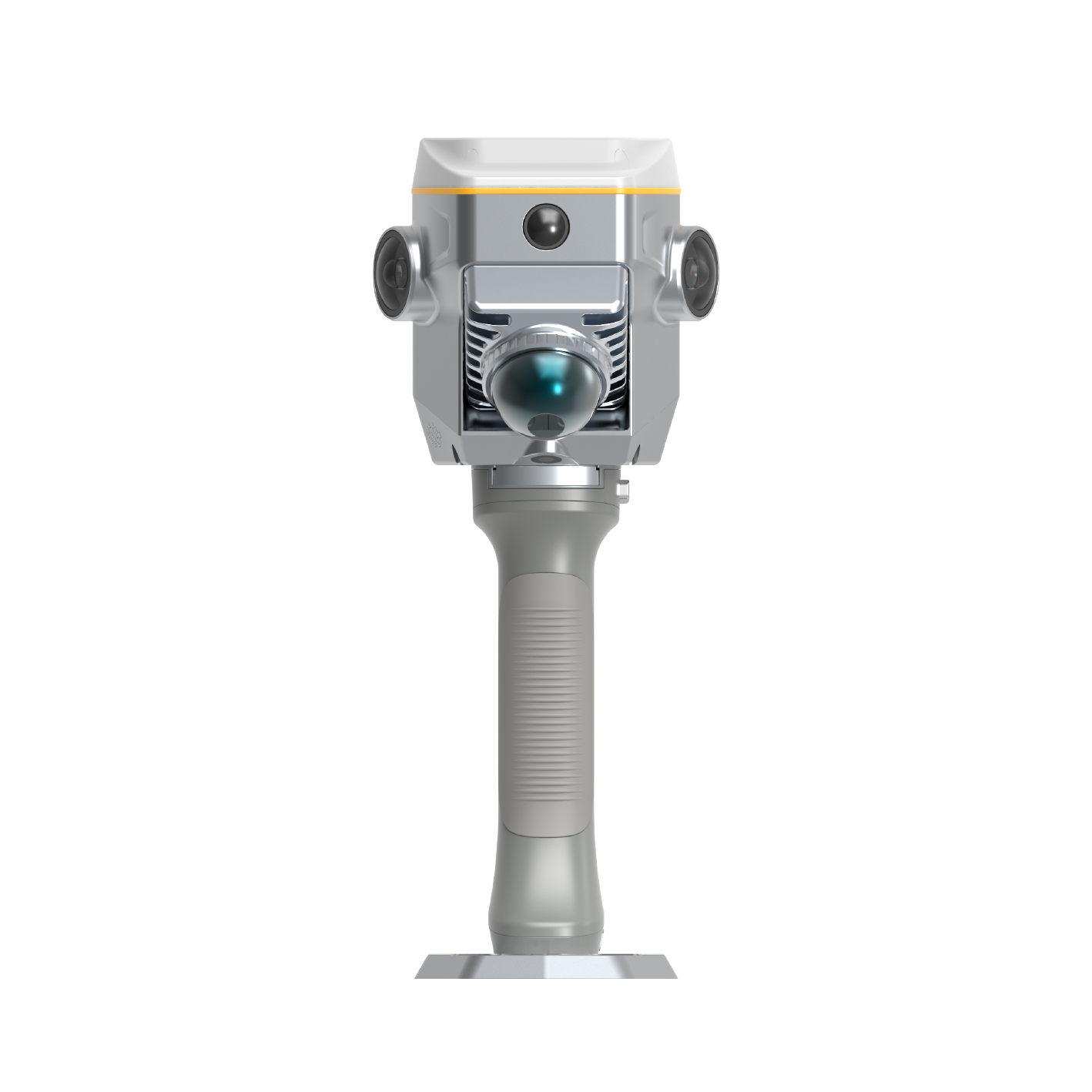
尺寸 | 234mm*112mm*120mm(含相机) | |||||
重量 | 2.25kg(不含相机) | |||||
工作温度 | -20°~+55° | |||||
防护等级 | IP64 | |||||
功耗 | 40W | |||||
正射相机(可选,与激光一体化集成) | ||||||
像素 | 4500W | 2600W | ||||
焦距 | 18mm | 16mm | ||||
传感器尺寸 | 36*24mm(8192*5460) | 23.5*15.6mm | ||||
像素尺寸 | 4.4um | 3.76um | ||||
视场角 | 90° | 73° | ||||
相机分辨率(航高200m) | 4.9cm | 4.7cm | ||||